
CANSAT #2: Softwarová řešení a design CanSatu
Další díl ze seriálu o stavbě studentského satelitu CanSat. Dnes něco k hardware i software.
Vítejte u dalšího z článků popisujících náš postup evropskou soutěží CanSat. V této části rozebereme naše řešení po stránce softwarové a hardwarové. Nejdříve nastíníme, jak funguje celý systém dohromady. Potom, již konkrétněji, jak vypadají jednotlivé subsystémy a proč jsme se pro ně rozhodli. Nakonec popíšeme, jaká konstrukční rozhodnutí jsme udělali a proč.
Jak tedy vypadá celý proces od sběru dat až po jejich zpracování? V samotném CanSatu se kromě padáku nachází dvě Arduina, senzory pro sběr údajů o teplotě, tlaku, zrychlení a GPS poloze, kamera, MicroSD karta, radiový vysílač a samozřejmě baterie. CanSat je tak rozdělen na dva okruhy, řekněme okruh A a B. Okruh A je postaven okolo Seeeduina Mega a je zodpovědný za sběr dat ze senzorů, jejich formátování a posílání do pozemní stanice. Okruh B založen na čipu ATMega328 sbírá periodicky fotografické snímky a ukládá je na MicroSD kartu. Ukládání dat umožňuje modul Micro SD čtečky. Zároveň také přijímá data od okruhu A a ukládá je na kartu. Data ze senzorů dále přijímá pozemní stanice tvořená Arduinem Pro Micro, které je připojeno jednak k anténě pro příjem radiového vysílání, dále k počítači/tabletu/mobilu. Na stanici běží naše aplikace, která data příjme a začne zpracovávat. Jak konkrétně uvidíme později.
Nyní k podrobnějšímu popisu. Začněme CanSatem samotným. Jak jsem již zmínil, sonda je rozdělena na dva nezávislé okruhy A, B. Když spustíme A, pošle signál do senzorů a získá z nich potřebné údaje. Ty napřed pošle na zem, poté je předá okruhu B a vrací se na začátek smyčky. GPS lokátor je taktovaný na 1Hz, takže sběr dat začne znovu za přesně jednu sekundu. Okruh B začíná snímkem, potom ve smyčce napřed zjistí, jestli má data od okruhu A. Pokud ano, uloží je do externího úložiště (MicroSD karta) a pokračuje v ukládání dat přijatých z kamery.

Diagram systému satelitu
Proč jsme použili tento dvouprocesorový systém? Jelikož chceme využívat i snímků z kamery, museli jsme překlenout následující problém. Uložení jednoho obrázku trvá dedikovanému Arduinu přibližně půl minuty. Vzhledem k tomu, že Arduino by muselo zároveň sbírat data a odesílat je, jeden zápis by trval ještě déle, tudíž bychom v odhadované době sestupu padesáti vteřin vyfotili možná jenom jeden snímek, což už se ani nevyplatí, nemluvě o komplikaci kódu a bufferování sériové komunikace s kamerou. Proto máme hlavní obvod časovaný na jednu sekundu a pro asynchronní operace je vyhrazen jiný čip.
Mezitím na zemi přijímá pozemní stanice packety dat. Vzhledem k tomu, že funguje více méně jako vysílačka, není na ní nic skutečně pozoruhodného. Co však je zajímavé, je aplikace zpracovávající data v počítači. Jak jsme již nastínili v předchozím článku, jedná se o aplikaci pro Universal Windows Platform, tedy je spustitelná a plně funkční na jakémkoliv zařízení, které běží na operačním systému Windows 10. To pak teoreticky dává možnost připojit Arduino pozemní stanici k telefonu a vývoj mise sledovat na něm. Připojení vyžaduje USB OTG (Universal Serial Bus On The Go) a podporu připojení periférií (například myš, či klávesnice).
Aplikace se spojí s Arduinem pozemní stanice přes USB a začne číst sériovou komunikaci. Z ní si díky předdefinovanému formátu packetů vytáhne a roztřídí data a začne je zakreslovat do grafů.

Aplikace s grafy
Nyní k hardwarové části. Ta má velmi přísná pravidla definující jak rozměry a hmotnost CanSatu, tak maximální a minimální sestupovou rychlost. Konkrétně musí být vnější obal sondy 115 mm vysoký a mít průměr 66 mm. Limit se nevztahuje na antény a padák. Na ně se však vztahuje váhové omezení, neboť CanSat se všemi komponentami musí vážit v rozmezí 300 – 350 g. Dalším omezením je stanovená rychlost pádu, která musí být větší 6 m/s, ale nesmí přesahovat 12 m/s. To tedy při stanovené výšce 500 m znamená v průměru 55 vteřin pádu. Tomuto všemu jsme museli přizpůsobit náš návrh a konstrukci CanSatu.

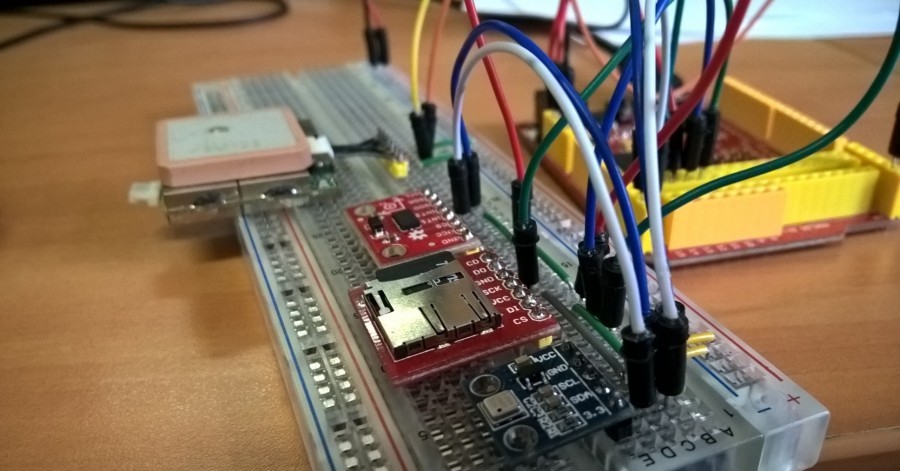
Zapojení satelitu
Kostrou celého zařízení je kovová konstrukce s háčkem pro uchycení na vynášecím dronu. V hardwaru bylo nejobtížnějším problémem časování otevírání padáku, což jsme vyřešili kapsou na spodní straně CanSatu trojúhelníkového tvaru s jednou stranou přichycenou na plechovce a protilehlý cíp je opatřen vlascem s očkem, které bude navlečené na tyč dronu před hlavní háček, takže kapsa se uvolní společně s vypuštěním.
Utekl vám předchozí článek o CanSat satelitu? Naleznete ho zde!

- Sledovač slunce s Arduinem - 23.3.2022
- Programovatelný kytarový pedál s Arduinem - 26.2.2020
- Arduino infračervený teploměr vytištěný na 3D tiskárně - 11.2.2020