
dalkova spoust pro zrcadlovku
Úvodní stránka › Fórum › Vaše projekty › Arduino › dalkova spoust pro zrcadlovku
Označeno štítky: senzor pohybu 433 mhz transmitter reciever
- Toto téma obsahuje celkem 28 odpovědí. Do diskuze (2 diskutující) se naposledy zapojil uživatel
 posjirka a poslední změna proběhla před 7 roky a 3 měsíci.
posjirka a poslední změna proběhla před 7 roky a 3 měsíci.
-
AutorPříspěvky
-
11.12.2016 v 13:17 #9470
 posjirkaÚčastník
posjirkaÚčastníkmyslím to takto.

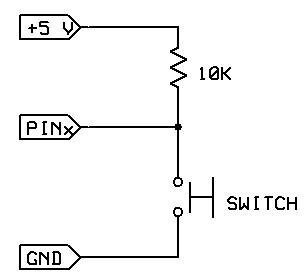
Připojením pinu přímo na +5V je skvělá cesta do pekel. Nikdy se nepřipojuje napájení přímo bez ochranného odporu. Hrozí zničení vstupních obvodů.Attachments:
16.12.2016 v 15:34 #9566fidosÚčastníkon tam ale na instrucables odpor nema, myslis ze bych moh tim odpalit nejake obvody na vysilaci? Ir ledka ale blika – i kdyz nevim ,jestli blika tak jak ma no.
16.12.2016 v 15:38 #9567posjirkaÚčastníkví bůh … já tam radši odpor aspo¨n 100R dávám…
16.12.2016 v 15:49 #9568fidosÚčastníkjeste mi neni jasna jedna vec, a to ze, po prvnim signalu na reciever se zapne ledka na pinu 13 a sviti porad, i kdyz se ir led vypne. Pak se pri pohybu zase ir ledka zapne a vypne atd. Ale na pinu 13 ledka sviti porad, od prvniho prijmuti signalu…
16.12.2016 v 16:27 #9570posjirkaÚčastníkto bude tím, že cela zprava konci bitem 1. potom ve smycce se to už nenuluje.
zkus použít zpravu = „2“17.12.2016 v 10:02 #9599fidosÚčastníkzmenil sem, ale sviti porad
17.12.2016 v 12:38 #9609posjirkaÚčastníka nepřijímá ti to nějáký bordel ?
17.12.2016 v 12:47 #9611fidosÚčastníkto nevim, ale ir ledka normalne vypne, jen porad sviti led na pinu 13
17.12.2016 v 14:29 #9612posjirkaÚčastníkhod sem ten kod co používáš …. když se dívám zpětně na forum tak tam jsou asi 3 verze tak a´t máme stejěné informace …
21.12.2016 v 14:11 #9691fidosÚčastníkkod pro transmitter :
#include <VirtualWire.h>
#define PIN_MOTION 2
#define PIN_LIGHT 13
#define PIN_TX 12char *message;
void setup() {
pinMode(PIN_LIGHT, OUTPUT);
pinMode(PIN_MOTION, INPUT);digitalWrite(PIN_LIGHT, LOW);
vw_set_ptt_inverted(true);
vw_set_tx_pin(PIN_TX);
vw_setup(2000);delay(1000);
}void loop(){
byte input = digitalRead(PIN_MOTION);if (input == HIGH){
digitalWrite(PIN_LIGHT, HIGH);message = „1“ ;
vw_send((uint8_t *)message, strlen(message));
vw_wait_tx();
delay(10);
}
else{
digitalWrite(PIN_LIGHT, LOW);
}
}kod pro reciever :
/*———————————————————————————-
Motion Activated DSLR Shutter Remote
Receiver Sketch (433mHz Serial RX)
Written By: Angelo Casimiro (ASCAS/ TechBuilder)
Date Written: October 18, 2014Pin Configuration:
– Digital#12 of Arduino to Data Out of RX module
– Digital#11 of Arduino to IR LED
———————————————————————————-*/
#include <multiCameraIrControl.h>
#include <VirtualWire.h>Canon D5(11);
void setup()
{
vw_set_ptt_inverted(true);vw_set_rx_pin(12);
vw_setup(2000);vw_rx_start();unsigned int data = 0;
pinMode(13, OUTPUT);
pinMode(11, OUTPUT);
}
void loop(){uint8_t buf[VW_MAX_MESSAGE_LEN];uint8_t buflen = VW_MAX_MESSAGE_LEN;
if (vw_get_message(buf, &buflen)){
if(buf[0]==’1′){
digitalWrite(13,1);
D5.shutterNow();
}
if(buf[0]==’0′){
digitalWrite(13,0);
}
}
}21.12.2016 v 22:33 #9718posjirkaÚčastník1. používej prosím funkci CODE (tlačítko nad textovým oknem odpovědi) jinak je ten kod špatně čitelný.
2. já bych o trochu pozměnil kod pro reciever:#include <multiCameraIrControl.h> #include <VirtualWire.h> Canon D5(11); void setup() { vw_set_ptt_inverted(true);vw_set_rx_pin(12); vw_setup(2000);vw_rx_start();unsigned int data = 0; pinMode(13, OUTPUT); pinMode(11, OUTPUT); } void loop(){ uint8_t buf[VW_MAX_MESSAGE_LEN];uint8_t buflen = VW_MAX_MESSAGE_LEN; if (vw_get_message(buf, &buflen)){ if(buf[0]==’1′){ digitalWrite(13,1); D5.shutterNow(); } else { // změna // if(buf[0]==’0′){ // zmena digitalWrite(13,0); } } }no a transmiter taky není moc dotáhnutý k dokonalosti:
#include <VirtualWire.h> #define PIN_MOTION 2 #define PIN_LIGHT 13 #define PIN_TX 12 char *message; void setup() { pinMode(PIN_LIGHT, OUTPUT); pinMode(PIN_MOTION, INPUT); digitalWrite(PIN_LIGHT, LOW); vw_set_ptt_inverted(true); vw_set_tx_pin(PIN_TX); vw_setup(2000); delay(1000); } void loop(){ byte input = digitalRead(PIN_MOTION); if (input == HIGH){ digitalWrite(PIN_LIGHT, HIGH); message = „1“ ; vw_send((uint8_t *)message, strlen(message)); vw_wait_tx(); delay(10); } else { digitalWrite(PIN_LIGHT, LOW); message = „0“ ; // zmena } }22.12.2016 v 18:26 #9727fidosÚčastníkzmeneno a porad stejny, tak nevim. Jinak sem meril napeti na pinu pro ir ledku a bylo tam jenom asi 0,05V při sepnuti, není to nejak malo?
22.12.2016 v 18:59 #9729fidosÚčastníkna recieveru taky porad stejny, při první prijmuti signalu je na pinu 13 porad napeti cca. 5V
23.12.2016 v 15:59 #9737posjirkaÚčastníkmusím přiznat, že mě te´d nic nenapdá ….
-
AutorPříspěvky

- Pro reakci na toto téma se musíte přihlásit.