
Arduino asistenční jednotka Kisaragi
Náš čtenář Bohumil Tuček nám poslal článek o jeho projektu asistenční jednotky.
Dnes tu pro Vás máme článek o asistenčních jednotkách. To jsou jednotky, které fungují jako samostatný počítač, který je jednoduché ovládat, ale ještě ke všemu se mohou pohybovat, mohou mít na sobě různá robotická ramena apod.

Asistenční jednotka Kisaragi
Jedním z nich je i tato asistenční jednotka Kisaragi (衣更着). Dostala jméno od mých japonských kolegů. Kisaragi je pojmenování měsíce února a také v překladu znamená doslova obléci si více vrstev oblečení. Jednotku totiž můžete díky modulům během pár vteřin předělat na něco trochu zábavnějšího, nebo naopak zabavit robotovi přední senzor, aby Vám neutekl. Není totiž nic horšího, než když vám při psaní emailu naštvané šéfové začne zdrhat počítač… Omlouvám se, vlastně je. Když se nepodívá před sebe, spadne ze stolu, vezme s sebou monitor, rozlije vám kafe na koberec a ještě si přerazí přední senzor 😀

Hardwarová výbava
Dost vtípků. Teď si Kisaragi představíme i hardwarově. Zatím to je jen prototyp, proto je vše vyrobeno ze stavebnice merkur. Postupem času vytvoříme open source podklady pro 3D tisk, Arduino i Raspberry Pi 🙂

Schéma komunikace
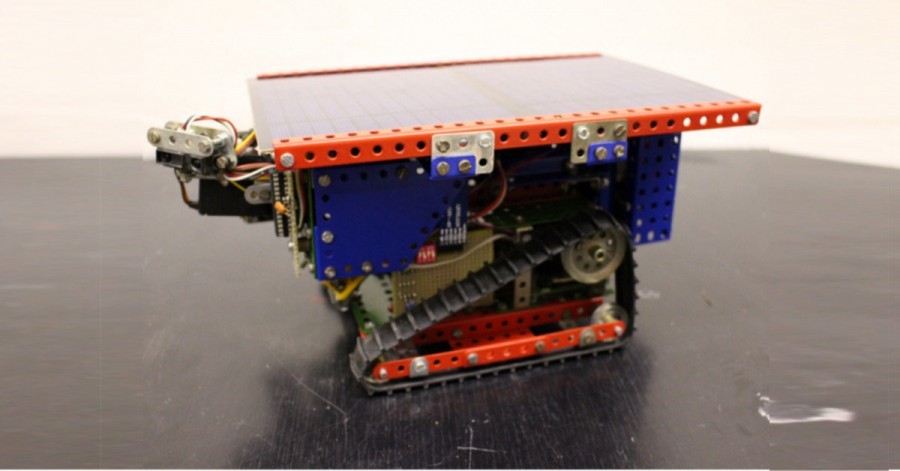
Hlavní část je vybavena motory s gumovýmy pásy. Ty zabraňují sklouznutí ze stolu a zároveň umožňují až třicetistupňové stoupání při jízdě. Co se týče elektroniky, je zde zabudované Raspberry Pi s operačním systémem Raspbian. Jednotka se tedy dá použít jako stolní počítač a zároveň má dostatečný výkon, aby v autonomním módu mohla přenášet hlas na server Googlu, tam ho vyhodnotit a stejnou cestou vám odpovědět.
Mluvící roboti sice už dávno nejsou zase takové Sci-Fi, rozhodně jim ale mluvení přidává notnou dávku osobnosti 🙂 Bohužel super výkon s sebou přináší obrovskou energetickou daň. Proto je zde zabudované i staré dobré Arduino UNO. Pokud zrovna netoužíte po IoT, zpracování složitých dat, nebo nepotřebujete ovládat jednotku jako pojízdnou webkameru z Japonska, tak stačí jen přepnout pár vypínačů. Obě tyto jednotky spolu komunikují přes I2C protokol, který zajišťuje možnost připojení i jiných modulů. Takovým může být třeba inteligentní baterie, přední IR senzor, tanková věž pro bojové roboty, manipulační rameno, a nebo jen solární panel pro letní blbnutí venku. U těchto jednotek jsou tedy jen dvě omezení. Prvním je kapacita baterie a druhým je vaše vlastní fantazie.
Já a můj mechanický kamarád se s Vámi loučíme. Přejeme Vám spousty úspěchů nejen při projektech a doufáme, že se brzy uvidíme na nějaké soutěži 🙂 Kdybyste se chtěli do projektu zapojit, dejte mi vědět v komentářích pod článkem.

- Sledovač slunce s Arduinem - 23.3.2022
- Programovatelný kytarový pedál s Arduinem - 26.2.2020
- Arduino infračervený teploměr vytištěný na 3D tiskárně - 11.2.2020
AkamuraCZ
15.2.2017 at 12:17OK, sepíšu nějaký článek a pošlu to sem jo 🙂
posjirka
23.1.2017 at 20:48je škoda, že to není více rozebrané. s dětma zkoušíme taky věci s merkuru a dost nám dělá problém pohon. Originální motor je tak slabý, že ztěží rozjede 1 pás. Zajímalo by mě řešení pohonu u tohoto modelu. …
AkamuraCZ
3.2.2017 at 23:47No buď Vám to můžu popsat, nebo vyfotit. Vyberte si 🙂
posjirka
4.2.2017 at 21:02můžu poprosit o pár fotek na posjirka@seznam.cz
moc děkuji
PikoDrak
7.2.2017 at 15:55Můžete to prosím někde nasdílet? Asi to bude zajímat více lidí 😀 Např. jaké motorky objednat (krokové, případně typ apod), jak jsou přidělané….?
Děkuji
jardik
11.2.2017 at 0:52Zdravím,
je teda pravda, že typ moturku je v tomto případě hodně důležitý a z tech fotek neni vůbec patrný jaký moturky jsou použitý.
Mam rozjetý podobný projekt,ale více po „Arduinovsku“.
Tělo a podvozek robota je z plexiskla 0.5 cm tlouštka. Robot je así 55X32X11 cm + 5 cm na výšku v předu veliký. Je to vlastně takový jezdící notebook:
Na podvozku je řidící elektronika (Arduino UNO, Rapsberry PI A, STM32 maple mini, PA9685 (I2C driver pro serva a pwm), L298N H můstek 3A (motor driver), ACS712 senzor proudového zatížení, ILI9341 tft 2.8″ spi display, HC05 bluetooth modul, aktivní repráček, snímač senzorů váhy HX711 a kněmu 4 senzory váhy. Následujou čtyři poslední lahůdky. Baterie 4.5AH 10.1V z notebooku, 2.5A převodník Step down 5V, měnič z 10.1V na vysoké napětí pro zářivku TFT displaye a vnitřek desky Z LCD monitoru 15″ pro převod VGA signálu na TFT display, převodník HDMI z raspberry PI na VGA a nakone samotný 15″ display z monitoru PC.
Celé je to poskládané následovně:
Jezdí to na 4 klasických žlutých Arduino moturkách poháněných max. 10 V přes výše zmíněný H můstek. Tyto motůrky vezou podvozek z výše z míněnou elektronikou a změtí propojovacích kabelů. Na tomto podvozku jsou v každém rohu asi 3 cm vysoké nosníky. Do jejích boku asi 2 cm vysoko je ucycen TFT display z monitoru a zakrývá, tak hnusnou změť kabelů a elektroniky pod ním. Na každém ze čtyř nosníků je umistěn váhový senzor a na tyto senzory je položena a na čtyřech místech zajištěna další deska z plexiskla o síle 0.5 cm. Tato deska slouží jako kryt před TFT monitorem a zároveň jako váha, třeba pro naši kočku, kterou tento robot néjen může zvážit, ale bez problému ji i uveze. V předu asi 2cm nat touto deskou je ještě příčka o šířce asi 5 cm, na které je připevně ultrazvuk HC-SR04 v pohyblivé kolébce jako sonar a vedle něj dotykový TFT LCD Display 2.8″ ILI9341 jako možnost rychlého zobrazení údajů z Arduino desek a přímé ovládání robota z místa. Navíc robot pro lepší jistotu při autonomní jízdě má 4X IR senzor překážek, každý na 1 straně.
Celý robot váží asi okolo 6 kil, ale i přesto 4 arduino moturky s ním i naši kočkou dokážou na plný výkon (10V) svižně po bytě jezdit. Výdrž použité (neni nová) baterie z notebooku je ¨při plném zatížení (všechny desky v provozu a monitor taky + jízda) asi tak 35 minut. Nabijení je velmi jednoduché, protože se jedná o Li-ion baterii, stačí připojit adaptér 12V 2A a baterie je nabitá za cca jednu hodinu, navíc má vlastní elektroniku, takže si nabijení sama vypne a nehrozí přebytí, nebo přehřátí. Dokonce neni nutno hlídat její zbývající kapacitu, protože pokavad by hrozilo přesáhnutí únosné hranice vybití a její zničení, včas ji její elektronika vypne.
Kolik byly náklady na takovéhoto robota se těžko vyčísluje, protože samotný displey byl z rozbytého monitoru (měl vadnou napájecí část, to je u většiny vadných LCD, zbytek byl ok). Podvozek z plexi moc nestál, protože jsem použil plexi z jiného rozbytého lcd monitoru 22″ (plexi se u všech lcd monitorů dává jako podklad pod samotný TFT display a toto plexi je pravý velmi pevný plexi né jako to z Bauhausu a spol), práce z vyřezáváním dílcůpro podvozek a uchycení moturku, byla nepřijemná a trvala asi 2dny. ¨propojovací kabely jsem nekupova, ale použil z rozbytých beden od PC, mají stejný Dupont koncovky (samičky) a výhodou je , že jsou mnohem delší než kupované hotové Arduino kabely. Zbývá tedy cena elektroniky Arduina a cena Raspberryho PI -můj odhad do 1700,- Kč a možná přehánim.
Stav projektu je takový, že před 2 týdny vánoci jsem na něm začal pro syna pracovat, během vánoc jsem ho dotáhnul po HW a mechanický části do konce. Celou půlku ledna jsem strávil z řešením jak odrušit Arduino motůrky a odstranit proudové špičky. Zbylou pulku ledna jsem řešil software pro Arduino a vlastní Android aplikaci na ovládání přes bluetooth HC05.
Poslední přídavek je zprovoznění vážení a Sonar radaru se zobrazením na TFT ILI9341 displaji.
Nějakou dobu zabralo hledání vhodné edice linuxu. nakonec zvítězil Raspbian, co mi na něm vadí, že má dlouhý náběh (skoro přes 30 sekund) a je moc na základním A Raspberry pomalej, ale zase existuje pro něj hodně vhodných programovacích jazyků a to zvítězilo. To zatim konec tohoto projektu a dal se pohnu až budu mít zase chvíli času. Pak snad dojde na software pro autonomní jízdu robota a další robotické kousky.
Co se týče těch motůrků, krokový motory nejsou vůbec nutný, jednoduší je použít klasické DC TT motory Arduino s kolečkem pro snímání otáčení (rychlosti) a IR optický senzor (závoru). Podle freqence a počtu pulsů zjistíte jak rychlost jízdy, tak ujetou vzdálenost, v dostačujícím rozlišení.
Jarda